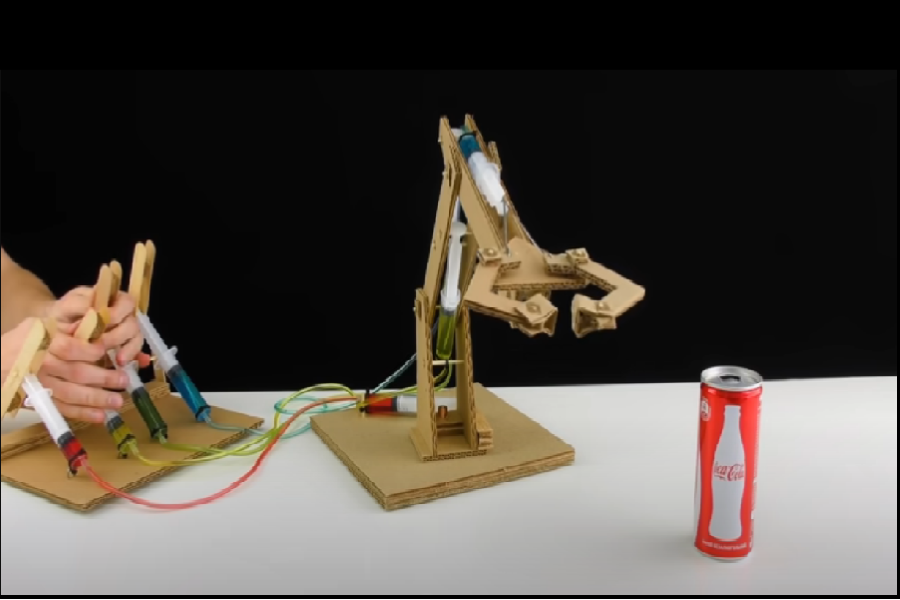
Modern hydraulics uses confined liquid to transmit power, multiple force, or produce motion. The fundamental concept of any hydraulic system operation and fluid power is Pascal’s Law, which states that pressure applied on a confined fluid is transmitted in all directions with equal force on equal areas.
How will the crane arm gripper move?
How will the principle of hydraulic system and fluid pressure be applied to operate my robot crane?
How can we design a cardboard robotic crane that is strong and sturdy to move an object?